3.Woche
Wir haben in dieser Woche begonnen
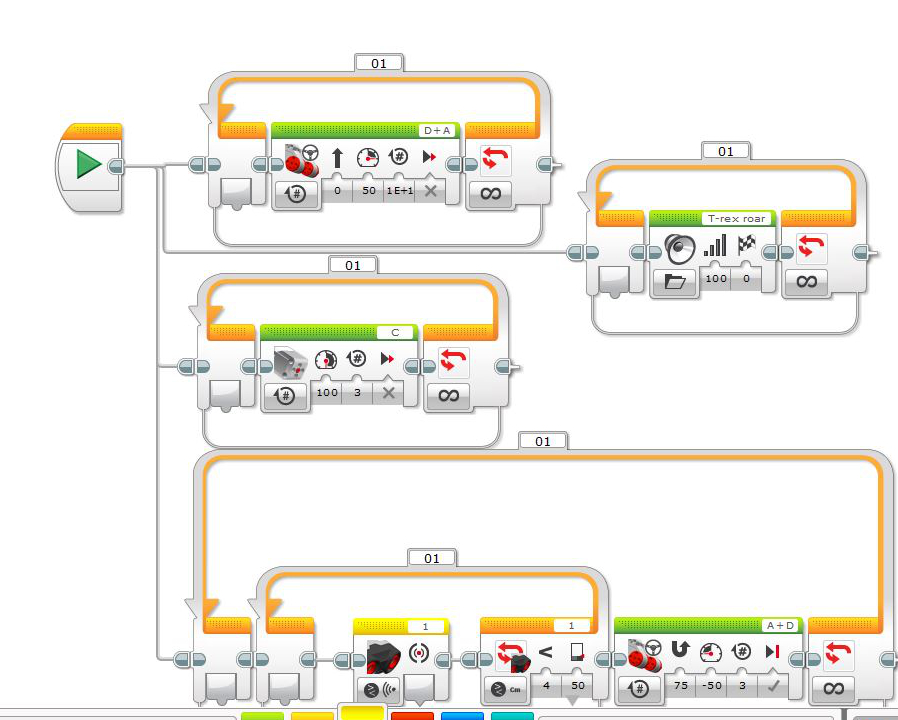
den Ultraschallsensor einzustellen.Wir wollten erreichen,dass
der Roboter,wenn er auf eine Wand trifft dreht.
So sieht das Programm dazu aus:

Wir haben in dieser Woche begonnen
den Ultraschallsensor einzustellen.Wir wollten erreichen,dass
der Roboter,wenn er auf eine Wand trifft dreht.
So sieht das Programm dazu aus: