5.Woche
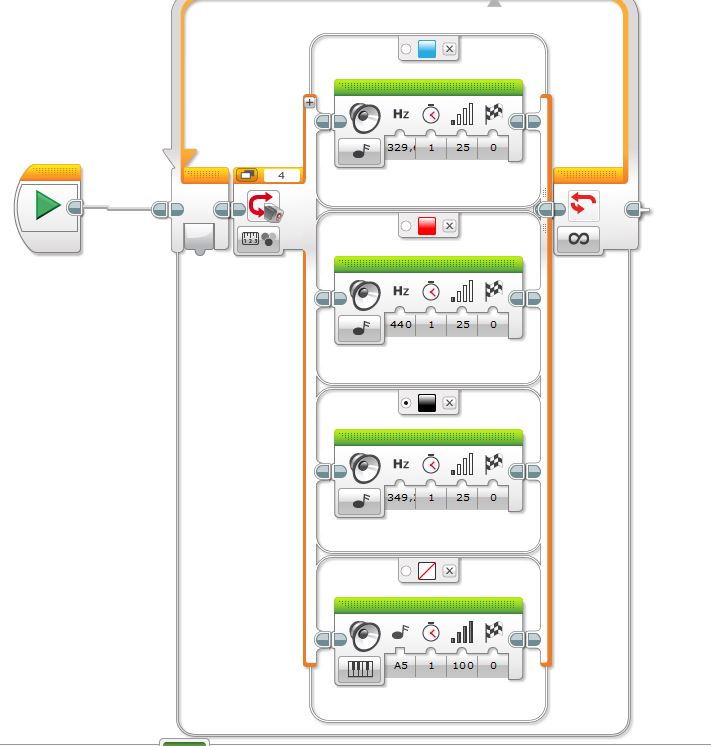
Diese Woche haben wir versucht wie
man den Farbsensor am besten mit einem
Schalter verbinden kann und damit er
bei jeder Farbe etwas anderes macht.
Außerdem haben wir versucht dem
Roboter einen Schuss-arm an zu
bauen, aber wir sind noch zu keinem
Ergebnis gekommen.